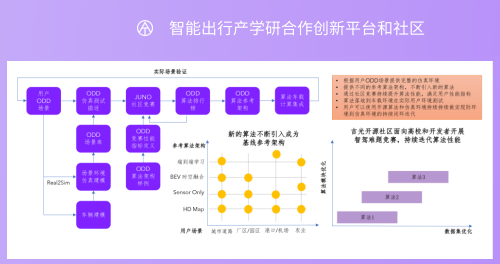
元遨CARSMOS(寓意Cars Mobility Operating System),作为依托开放原子开源基金会的智能出行项目群,旨在提供一个技术先进的、标准的、开源的平台,解决智能汽车研究、教育和产业合作中的平台封闭和碎片化问题。本项目群包含了来自产、学、研的贡献、赞助和参与
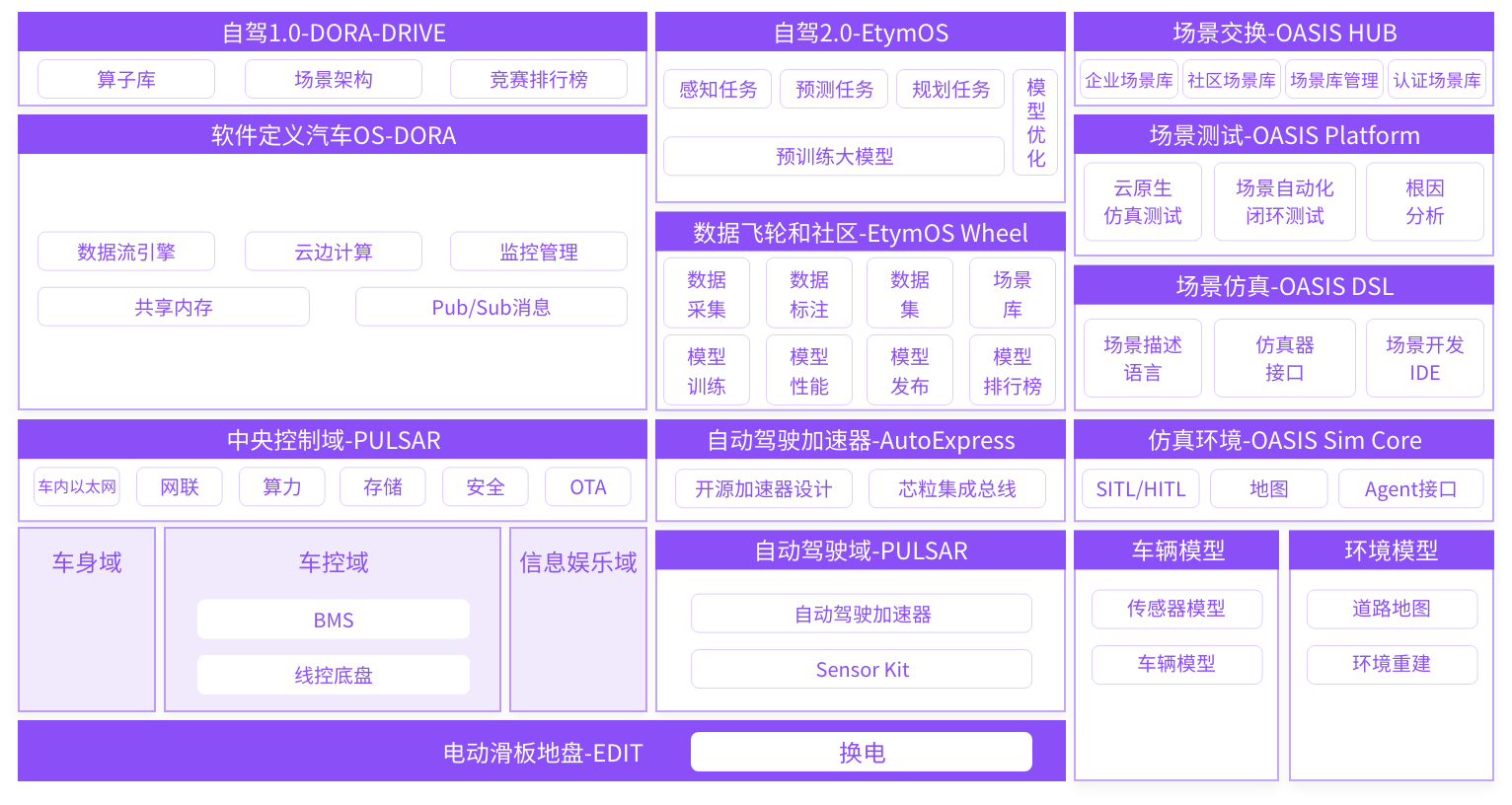
EDIT EV低速电动滑板底盘
PULSAR开放电子电气架构
AutoExpress芯粒互联技术和敏捷DSA芯片设计标准
DORA数据流中间件和SDV(软件定义汽车)业务开发平台
EtymOS自动驾驶大模型和数据飞轮平台
OASIS场景描述语言和仿真测试平台
开源软件部分采用Apache 2.0, 兼容木兰宽松许可证v2 (MulanPSLv2), 开源硬件部分采用CERN-OHL-W-2.0协议。
我们期待通过这些统一平台技术,服务高校教育和科研的智能汽车教育和科研的基础需求,也成为和产业对标对话的平台,让教育和研究紧紧对标产业需求,加速研究成果到产业的落地速度。
 开源智能出行教育/研究/产业化平台
开源智能出行教育/研究/产业化平台